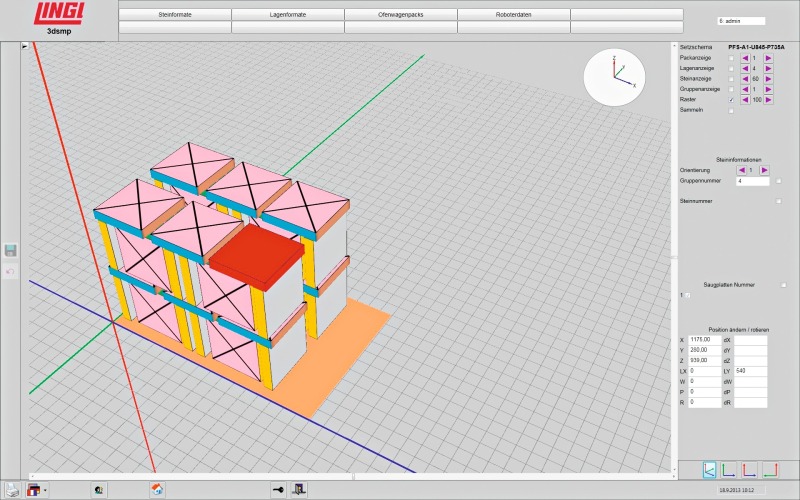
3-D setting scheme program

Today’s production processes must be extremely flexible and efficient. In the process for the manufacture of ceramic building materials this means in concrete terms making a large number of different sizes and types of bricks with a minimized use of resources.
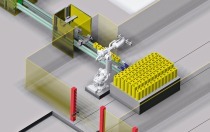
Complex stacking tasks require a large number of position settings for the robot. In Lingl plants, these have so far been specified after manual calculation in tabular form in the machine operation and visualization system. When a very large number of individual positions or different orientations of the bricks are needed or for handling...