Eisenmann VarioClone macht Roboterprogramme genauer und besser übertragbar
Der Anlagenbauer Eisenmann hat ein System entwickelt, mit dem Roboter schnell und effizient kalibriert werden können. Danach erzielen sie absolutgenaue Ergebnisse mit einer Abweichung von weniger als 3 mm. Darüber hinaus ist es möglich, dass die Programme eines Roboters auf andere Roboter in der Fertigung übertragen werden können. VarioClone kann bei den gängigen Robotertypen aller Hersteller eingesetzt werden.
Bei den heute üblichen Verfahren zur Programmierung von Industrierobotern unterscheidet man zwischen der Offline-Simulation am PC und der Online-Programmierung direkt am Robotercontroller. Die Vorteile der Offline-Simulation liegen darin, dass Roboterprogramme in einer virtuellen Welt erstellt werden können, ohne direkt auf die Roboter in der Fertigung zugreifen zu müssen. Dadurch vermeidet man teure Stillstandszeiten, die bei der zeitintensiven Online-Programmierung direkt am Roboter gegeben sind.
Unter Toleranzbedingungen betrachtet ist jeder Roboter ein Einzelstück, d. h. der reale Roboter weicht immer vom idealisierten Robotermodell ab, das in der Simulation verwendet wird. So konnten bisher mittels Offline-Simulation erstellte neue oder optimierte Programme nicht direkt auf den realen Roboter übertragen werden. Dies erforderte das aufwändige Anpassen der Roboterprogramme mittels Online-Teach-In Verfahren oder zeit- und kostenintensive Messverfahren.
Funktionsweise
Die Fehlereinflüsse, denen jeder Roboter unterliegt, werden in der Regel in geometrische und nicht-geometrische Fehlereinflüsse unterteilt. VarioClone gliedert diese Betrachtungsweise neu und differenziert die Einflussgrößen nach Individual- und Baureihenfehlern des Roboters. Letztere müssen für alle Roboter einer Baureihe nur einmal bestimmt werden, dabei untersucht man Fehlereinflüsse aus den Gelenkelastizitäten und erstellt daraus ein Gravitationsmodell. Um die Roboterindividualfehler zu bestimmen, werden sämtliche Achsen des Roboters einzeln vermessen. Pro Roboterachse benötigt VarioClone nur drei Messpunkte. Das bedeutet, dass bei einem sechsachsigen Knickarmroboter nur einmal 18 Messpunkte im Arbeitsbereich des Roboters zu bestimmen sind. Der Zeitaufwand für diese Vermessung liegt bei etwa einer halben Stunde.
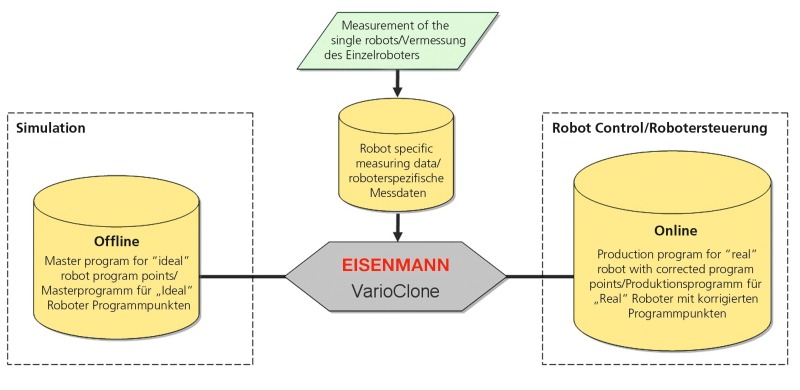
Die ermittelten Vermessungsdaten des jeweiligen Roboters werden in das VarioClone-System eingespielt und zur Berechnung eines Modells herangezogen. Dieses individuelle Robotermodell gleicht die vorhandenen Toleranzen des realen Roboters aus. Die in der virtuellen Welt erstellten Roboterprogramme werden so über VarioClone auf Basis der individuellen Robotermodelle konvertiert und danach auf den realen Roboter übertragen. VarioClone fungiert somit als Bindeglied zwischen virtueller und realer Welt und kann bis zu 89 % der geschilderten Fehlereinflüsse kompensieren.
Soll nun ein Roboter auf dieselben Aufgaben programmiert werden wie sein Pendant in einer parallelen Fertigungslinie, kann dessen Roboterprogramm mithilfe von VarioClone übertragen werden. Bei diesem Klonvorgang wird das zu kopierende Programm mit den in VarioClone hinterlegten Daten des ersten Roboters zu einem Masterprogramm konvertiert. Dieses Masterprogramm wird anschließend auf die individuellen Modelldaten des zu programmierenden Roboters angepasst und in die Fertigungslinie übertragen.
Anwenderfreundlich, genau und übertragbar
Die Implementierung und Handhabung von VarioClone ist einfach gestaltet. Alle benötigten Konvertierungsvorgänge sind im System hinterlegt und bedürfen keiner speziellen Programmierkenntnisse. Eine Interaktion und Anpassung durch Maschinenbediener oder Instandhaltungspersonal ist nicht notwendig. Um den Roboter schnell und effizient auf seine Aufgabe einzustellen, muss lediglich die einmalige Vermessung des Roboters zur Ermittlung der Individualfehler durchgeführt werden.